
何がなんでも、ラジコン化したい!!
訳では決してない。のです。僕の場合は…。別に…
油圧システムとして、その理屈を確立したい、遊びな気持ちで真剣に実験したい。そしていざ具現化する際は、誰よりもぶっちぎりで自力で実現させたい。😛
ただそう思うだけ!。別にマシン横歩きで僕はいいさ。あまり面倒とは思わないよ。全然いやじゃない。
でも狭い空間では、確かに挟まれるリスクは高い気がする。よね??(笑)この前もコーナーでイン側で挟まった!!もん。オレ。
しかし、ECO1の場合、そもそもシートに座ってリーダー倒して走行運転できないのは笑える設計だよね!!。😂
そんな設計でも、シート付いてないと怒られる現場もある。
仕方ない!!その代わり初代ECO1より、全高、相当下がってんだから感謝!!リーダーあれだけ倒せるシリンダーの傾斜設計、見事なもんです。
もう少し倒そうと支点ずらしたり、シリンダー長さ変えようとすると、逆にマイナス傾斜が犠牲になるんですよ。前に倒せなくなる。
傾斜地ではマイナスリーダー傾斜、結構普通に有りうるよね??掘削中もしょっちゅう調整するしさ。
だから、そういう総合的な設計度合で見れば、めっちゃ考えられてる。んだよね!!
でも、マジで挟まれるぞ!!あれは!!(笑)この前シート座って細い路地運転してたら、少しレバー膝に当たってリーダー顔面に当たりかけた!!😮
って考えたら、やっぱり遠隔走行手段は持ってた方が有利だよね。でもそんな簡単じゃないし、自己責任での改造になるから慎重に進める必要はある。
まだまだハードルは数多いけど、今のうちから勉強しておこう。無線運転について何が必要なのか。
そして、HAWEジャパン株式会社、来社!!
技術的にいろいろ相談出来ました。比例制御方向スプール切換え弁、パイロット比例制御電磁弁、リモコンアンプ基盤などなど。
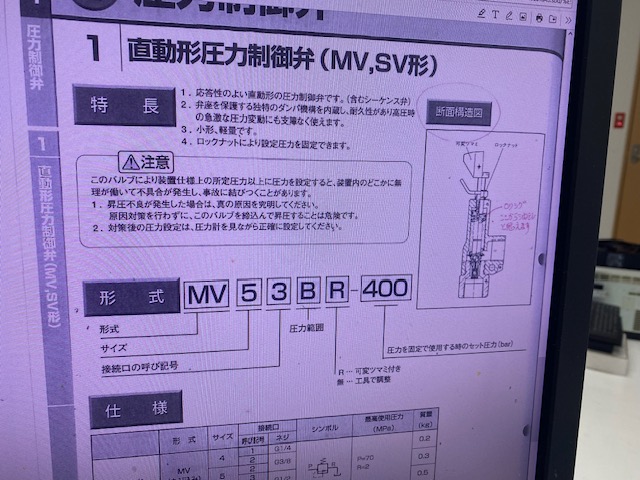
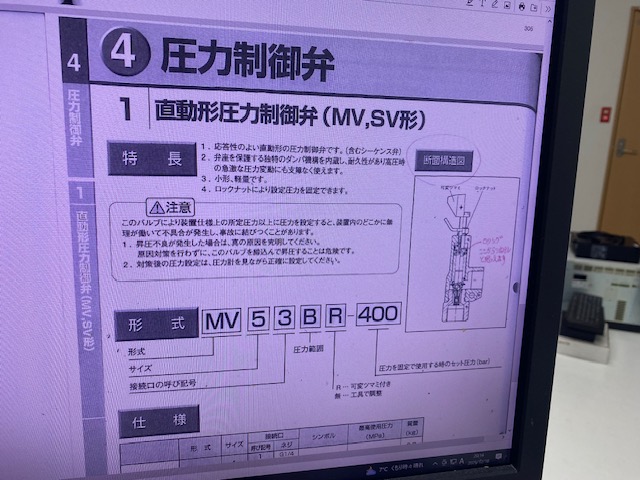
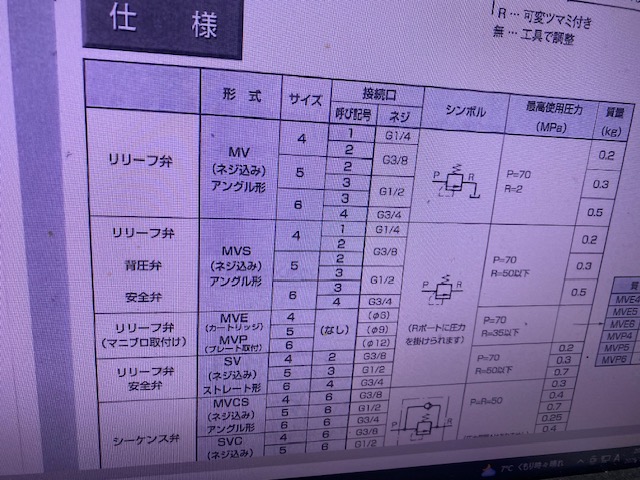
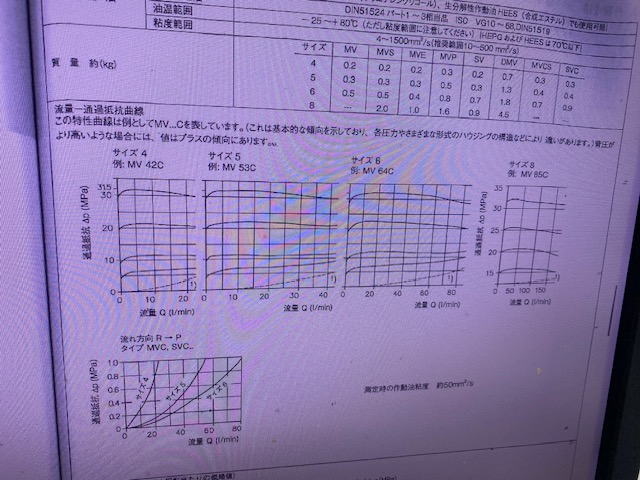
ついでにECOで良く使われてるリリーフ弁(直動型圧力制御弁)についてもいろいろ再確認できました。
一般的にこのような圧力制御弁などは、最低作動圧力値があるため、全部解放リリーフしていても、若干押してんだよね!!やっぱり。
その理屈、説明頂きよく理解できました。🙂
弊社のECO1、全開放でフィード圧リリーフしても、フィード下がる現象が、これで説明できたのかもしれません。(自重落下+最低稼働フィード圧)







コメント